

DESCRIPTION
COURSE OUTLINE
CERTIFICATION
DESCRIPTION
Duration: Approx. 16 hours
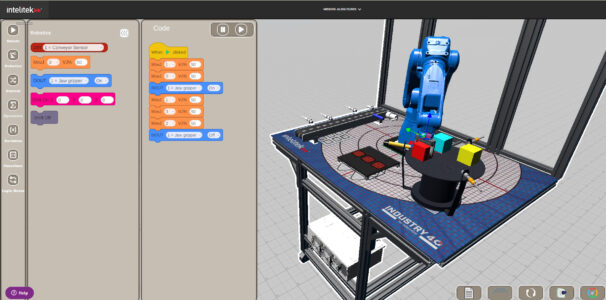
Fundamentals of Robotics with RoboX is an online curriculum that provides students the fundamental skills needed to operate, maintain, program and test robotic systems using virtual robotics. The course uses the RoboX gamified, realistic, 3D robotic simulation software, that allows students to experience operation and programming skills through a variety of simulated robotic missions.
Fundamentals of Robotics with RoboX is an online curriculum that provides students the fundamental skills needed to operate, maintain, program and test robotic systems using virtual robotics. The course uses the RoboX gamified, realistic, 3D robotic simulation software, that allows students to experience operation and programming skills through a variety of simulated robotic missions.
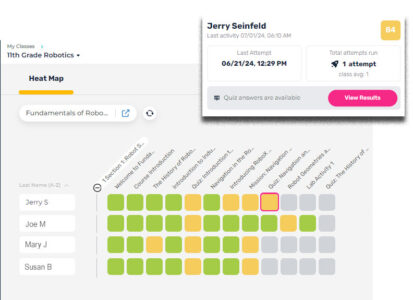
RoboX is the base training for students to complete the NIMS Robotic Operator virtual certification.
RoboX can be expanded to classes that use real robot hardware as well with the included exercises and labs.
RoboX can be expanded to classes that use real robot hardware as well with the included exercises and labs.
Below is a video showing the robot simulation in RoboX
COURSE OUTLINE
Course Outline
CERTIFICATION
![]()












