
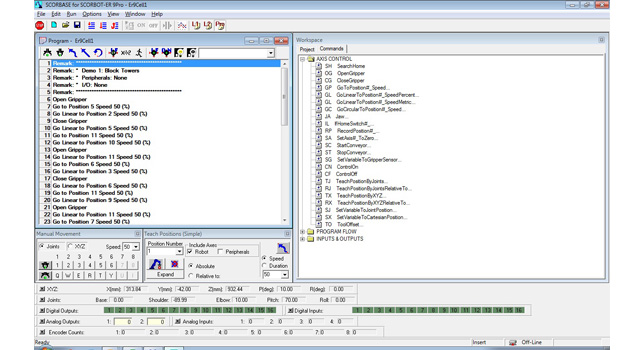
ScorBase robotics control software provides a comprehensive and intuitive tool for programming and operating robotic workcells.
The software allows students to experiment with a variety of simulated workcells as part of the Intelitek curriculum or independently.
The software has several operational levels, each with progressively more functionality, making the software suitable for both novice and advanced users.
In addition to Intelitek robotic arms, the software supports peripheral servo axes and both digital and analog I/Os, thereby providing a comprehensive tool for programming and operating an entire robotic workcell.
Menus and dialog boxes can be displayed in various configurations, making programming and control much easier. Positions can be recorded, for example, while programs are being edited.
The ScorBase Software is provided on a CD with Intelitek robotics packages or can be downloaded from downloads.intelitek.com
SCORBASE provides user friendly interface and visible interface for robotic program execution.
Position recording
- Positions can be recorded both online and offline.
- Positions can be absolute or relative.
- Position coordinates may be for robot arm, peripheral axes, or both.
- Unlimited number of positions can be recorded
- User can manually move robot to desired location and instruct controller to record position.
- User can enter XYZ coordinates for positions.
- Position list displays all recorded positions and their coordinates. Different display options allow user to organize and display position data in an easily-understood format.
- Positions recorded by teach pendant are automatically recognized by SCORBASE.
Manual control of robot and peripheral axes
- Movement by joints and and Cartesian coordinates at selectable speeds
- Movement control from dialog box, keyboard and teach pendant
- Graphic image of robot; user clicks on axis arrows to move robot axes.
Program execution
- Programs can be executed both online and offline.
- Options to execute one command, single cycle or continuous cycle.
- Command currently being executed is highlighted in program window.
- Run, pause, resume and abort program available at all times.
Real-time data display
- Real-time, continuous display of robot and peripheral positions (encoder values and XYZ coordinates) and I/Os
- Real-time, continuous display of home switches’ status, joint angles, command value (PWM) and position error
- Dynamic charts present encoder values, command value (PWM) and position error
Open system: integration and support for workcell components
- Full integration with ViewFlex machine vision system, enabling robot guidance and quality control applications
- Full integration with automated MIG welding system
- Supports programming and control of two peripheral servo axes
- Monitors and controls digital I/O devices
- Monitors and controls analog I/O devices
- User can simulate inputs and output status for offline program testing.
- API software utility is provided to enable C/C++ programming interface to the controller
Parameter manipulation
- 160 user-accessible parameters, including: servo control; PID, speed, velocity profile; axis position error; gripper operation; thermic, impact, limit protection; homing; Cartesian calculations
- Parameter tables can be easily viewed and manipulated; include detailed descriptions
- Parameters can be optimized and saved for different functionalities (e.g., maximized speed, payload, accuracy)
- Program command can be used to alter a parameter value during program execution
- Program command allows selection and activation of a predefined set of parameters during program execution
User interface
- Industrial functions in an intuitive interface designed for training environments
- 3 operating modes:
- Online: SCORBASE communicates with the controller. The robot, peripheral axes and I/Os execute all commands.
- Offline: SCORBASE does not communicate with the controller, even though it may be connected; axes do not move; I/Os are not switched, but different I/O states can be simulated by user (useful for testing/debugging programs).
- Simulation: SCORBASE communicates with RoboCell simulation software, which executes all SCORBASE commands
- Several operational levels, each with progressively more programming and operational features, allow novice and advanced users to work in environments best suited to their level of expertise.
- Users can switch levels without exiting software or rewriting projects
- Icon toolbars for frequently used commands and operations
- Predefined and user-configurable screen layouts
- Programs and positions can be saved and loaded separately or together
- Programs, positions and graphic cell setups are created and stored together as a “”project””; users can open, view and save related data in a single mouse click
- Comprehensive online help
- Demo projects
- Print programs and positions
- Print preview and print functions for 3D cell setups and dynamic charts
Interface languages
- English, Spanish, Portuguese, German, Korean, Vietnamese, Polish.
- Can be easily translated into any user language
Program editing
- Over 40 commands easily selected through icons, keyboard shortcuts and command list.
- Command list displays all available SCORBASE commands grouped by functionality.
- Single-command character generator calculates and teaches all positions required for producing any text string; used in robotic writing, painting and welding applications.
- Dialog boxes for all commands include prompts and options to ensure correct and complete syntax during program editing
- Unlimited number of programs can opened and viewed simultaneously.
- Unlimited number of program lines
- Standard Windows functions for program editing (e.g., cut, copy, paste, find).
Data SheetClick here to download a pdf data sheet.
DOWNLOAD












